Location Matters
Case Study: libgeo2pixel
The libgeo2pixel library implements all required reference frames, coordinate systems, and the three geolocation algorithms (Ray Marching, Ray Intersection, Gradient Descent). It is written in C, optimized for speed and easy to port. Rotations are performed only with quaternions, making it suitable for real‑time use. Its only dependencies are the C standard library and a small interface to the gdalinfo tool for accessing DEM (digital elevation model) data; otherwise it is completely self‑contained. This allows the library to run on smartphones, drones, or other consumer devices.
CamTraps 2024 PaperCase Study: Perceptomat
The video stream of a drone is analyzed in real time by AI-powered software. Prompt-based object detection is used to define potential indicators (e.g., specific objects, traces or patterns). Identified indicators are geo-located and related to an upstream causal risk model (Riskomat) to detect complex scenarios, e.g. when indicators are harmless on their own but the threat increases in spatial combination. The prototype operates exclusively with off-the-shelf hardware and does not require expensive special sensors. Application areas can be found in emergency services organizations, for example.
Präsentation: Geolokalisierung von Objekten in Drohnenvideos (IKT Sicherheitskonferenz 2025)

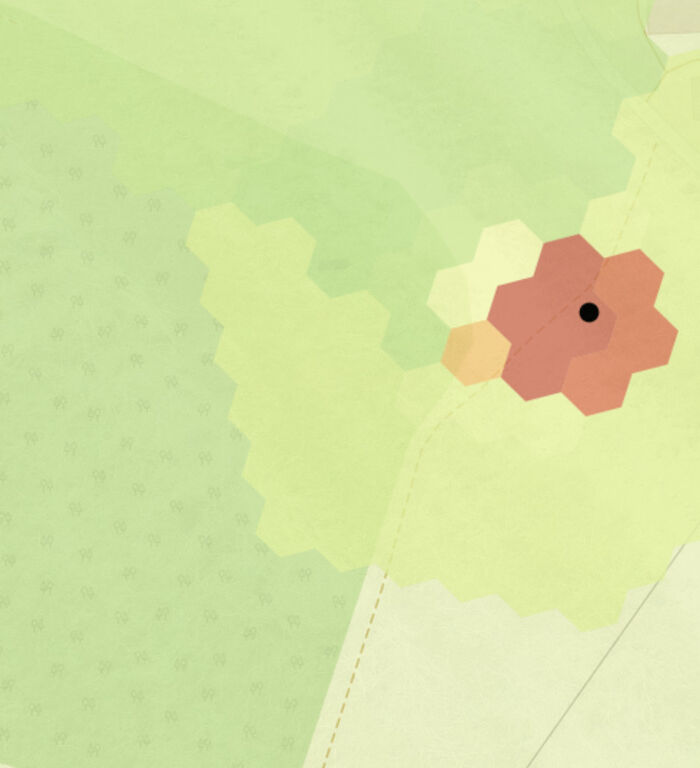
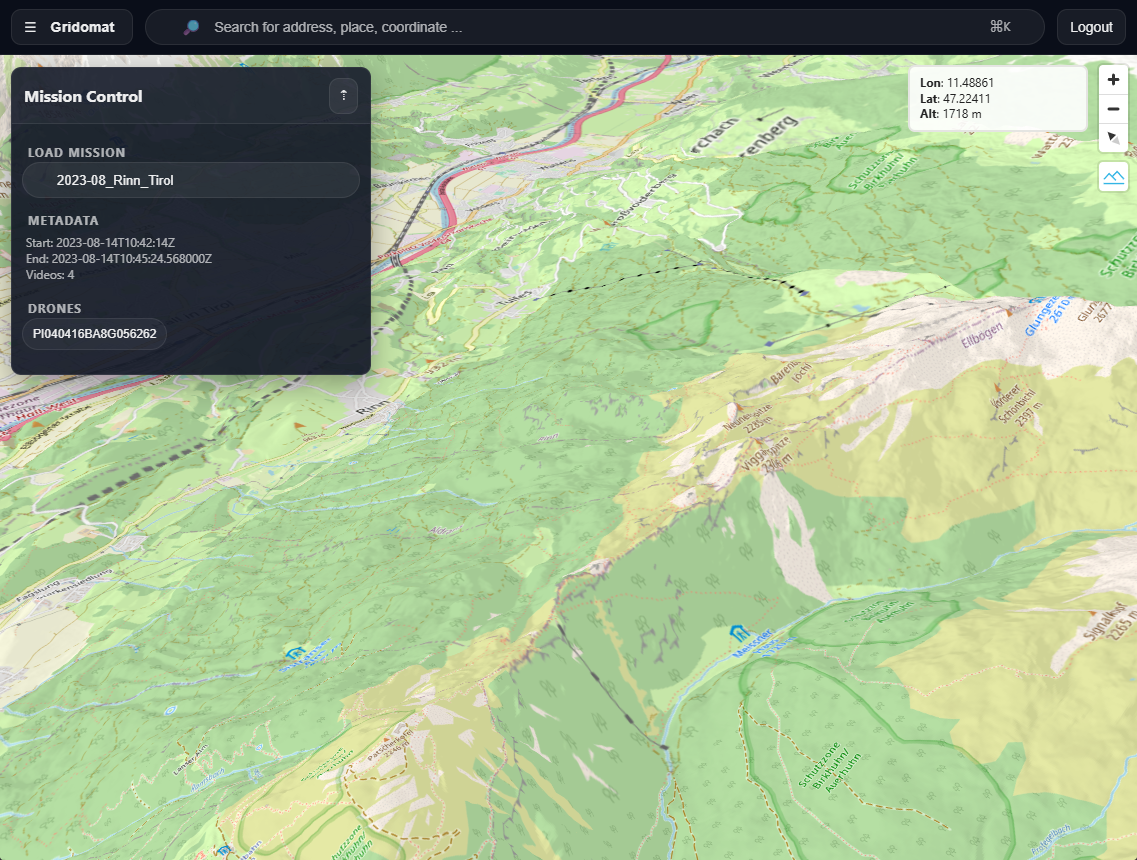
Case Study: Gridomat (ongoing)
Gridomat is a self‑contained, web‑based platform that processes video streams from multiple drones simultaneously. Unlike Perceptomat’s single‑drone system, the platform aggregates data in real time, applies the same prompt‑driven object detection, and gathers evidence for the causal risk model (Riskomat). Parallel analysis creates a more comprehensive situational picture, enabling rapid, evidence‑based risk assessment and evacuation decisions. The solution runs entirely in the browser, requires no special infrastructure, and scales flexibly with the number of connected drones.