Standort entscheidet
Fallstudie: libgeo2pixel
Die Bibliothek libgeo2pixel enthält alle nötigen Referenz‑ und Koordinatensysteme sowie die drei Geolokalisierungs‑Algorithmen (Ray‑Marching, Ray‑Intersection, Gradient‑Descent). Sie ist in C geschrieben, sehr schnell und leicht zu portieren. Rotationen werden nur mit Quaternionen berechnet, sodass sie sich gut für Echtzeit‑Anwendungen eignen. Als einzige Abhängigkeiten gibt es die C‑Standardbibliothek und ein Interface zum gdalinfo-Tool, das DEM‑Daten (Geländemodelle) liest; sonst ist die Bibliothek komplett eigenständig. Damit kann sie auf Smartphones, Drohnen oder anderen Geräten verwendet werden.
CamTraps 2024 PaperFallstudie: Perceptomat
Der Videostream einer Drohne wird in Echtzeit von einer KI-gestützten Software analysiert. Über Prompt‑gestützte Objekterkennung werden potentielle Indikatoren (z. B. bestimmte Objekte, Spuren oder Muster) definiert. Identifizierte Indikatoren werden auf geographisch verortet und mit einem vorgelagerten kausalen Risikomodell (Riskomat) in Relation gebracht, um komplexe Szenarien zu erkennen, z.B. wenn Indikatoren für sich alleine unbedenklich sind, aber im räumlichen Zusammenspiel die Bedrohung steigt. Das System arbeitet ausschließlich mit handelsüblicher Hardware und verzichtet auf teure Spezialsensoren. Anwendungsfelder sind beispielsweise in Blaulichtorganisationen zu finden.
Präsentation: Geolokalisierung von Objekten (IKT Sicherheitskonferenz 2025)

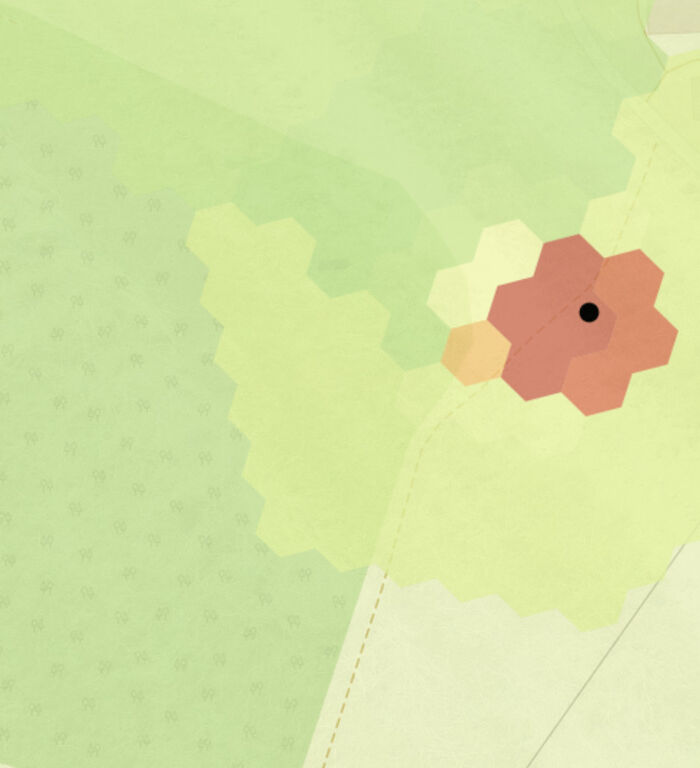
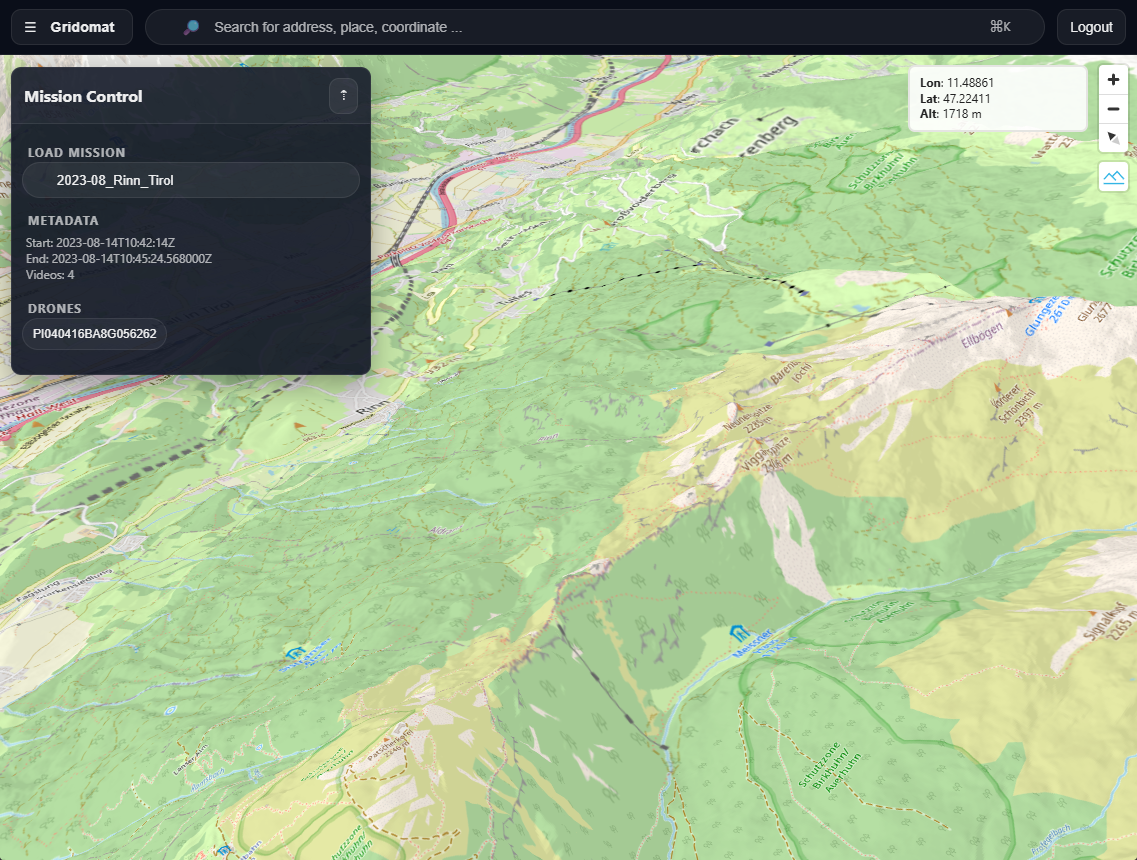
Fallstudie: Gridomat (laufend)
Gridomat ist eine autarke, webbasierte Plattform, die Video‑Streams mehrerer Drohnen simultan verarbeitet. Im Gegensatz zu Perceptomat's Einzel‑Drohnen‑System aggregiert die Plattform Daten in Echtzeit, wendet dieselbe prompt‑gestützte Objekterkennung an und sammelt Belege für das kausale Risikomodell (Riskomat). Durch parallele Analyse entsteht ein umfassenderes Situationsbild, das schnelle, evidenzbasierte Risiko‑ und Räumungsentscheidungen ermöglicht. Die Lösung läuft komplett im Browser, benötigt keine spezielle Infrastruktur und skaliert flexibel mit der Anzahl verbundener Drohnen.